Path Planning#
Path#
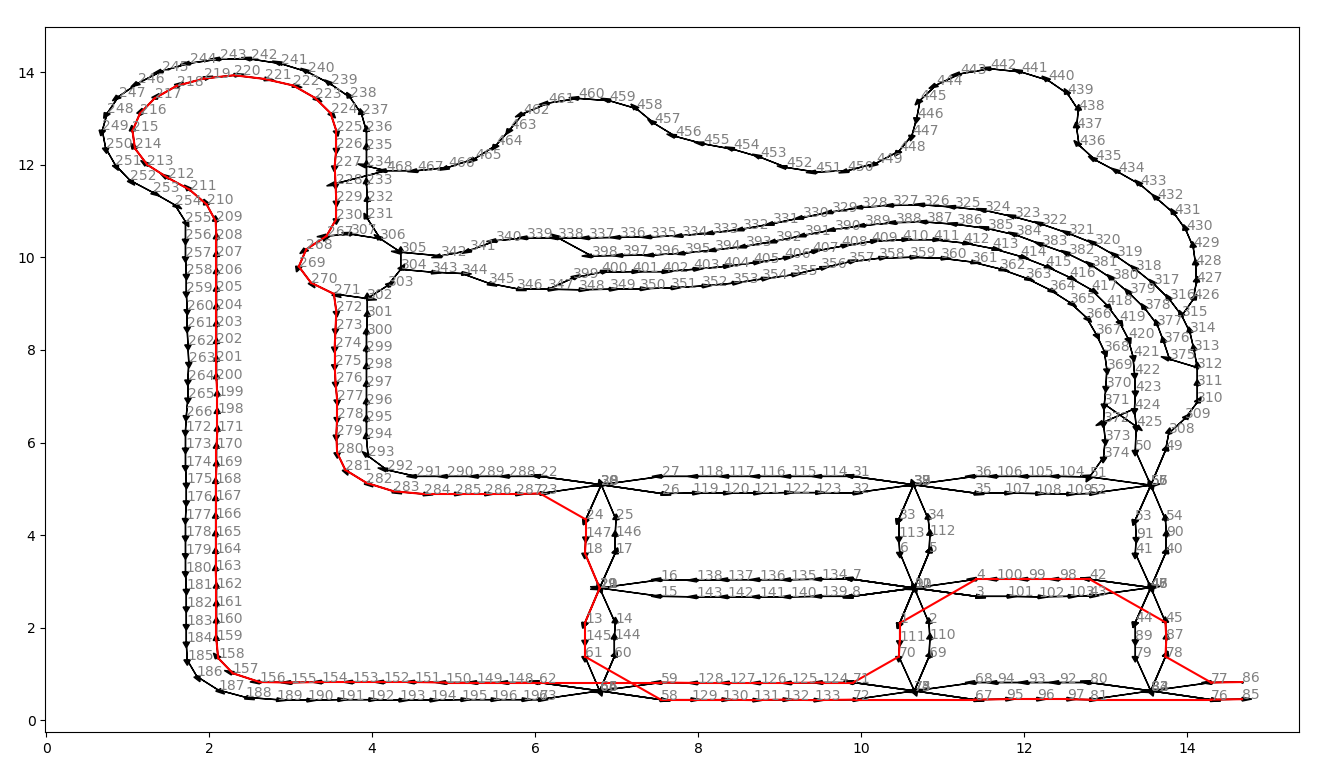
The organizers gave some files that contained the track encoded as a graph. We parsed them and used the resulting graph to calculate paths (e.g. with the Dijkstra algorithm) and execute path following (the car going through the planned path). Path following was implemented in the following way: the car knows its current node (its current GPS coordinates allow us to find the closest node), and gets the next node from the calculated path. This way, the car knows the actions it must take in order to go to the desired place (e.g. at an intersection it knows whether to turn left or right). Plot of the obtained graph:
Competition Experience#
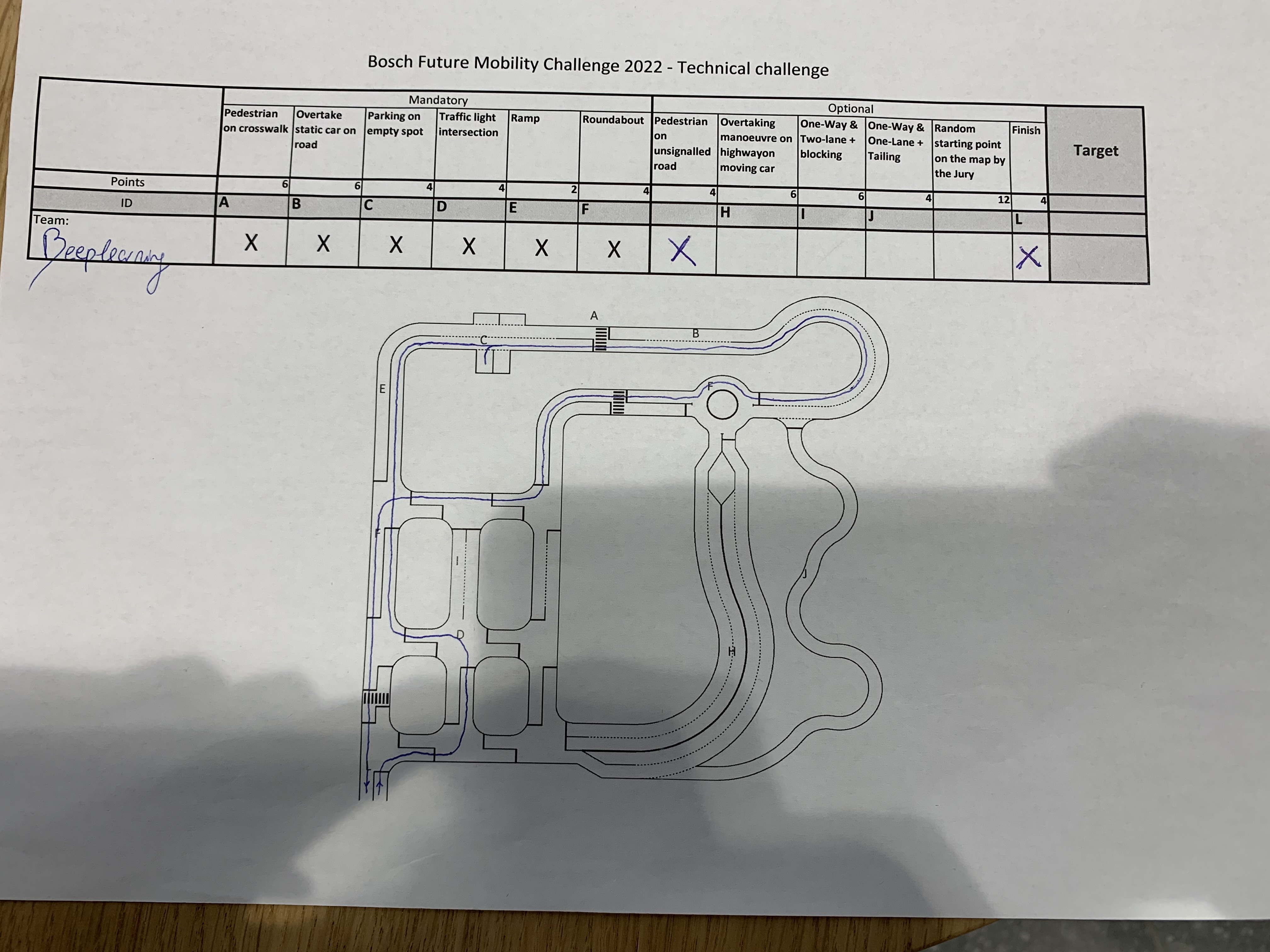
During the competition, we had to pre-program the path that the car was going to take before the run (normally the day before). We had to give our planned path to the organization so that they could prepare the track for the tasks that we wanted to achieve. Our path had to go through all of the mandatory challenges, and through the optional challenges that we chose to attempt. Here is the sheet we had to fill in and give to the organizers: